Computer Vision and Robotics
Research Scientist

About me
Tenured Research Scientist at Vislab, ISR|Lisboa, IST. Senior member of IEEE and ELLIS society member.
Research statement
Provide robots with skills for object manipulation and social interaction with humans, learned by observation and exploration.

Ongoing Research Projects

RePAIR
The project “Reconstructing the past. Artificial intelligence and Robotics meet Cultural Heritage” aims to develop innovative technology to virtually eliminate one of the most laborious and frustrating steps in archaeological research, namely the physical reconstruction of shattered works of art.
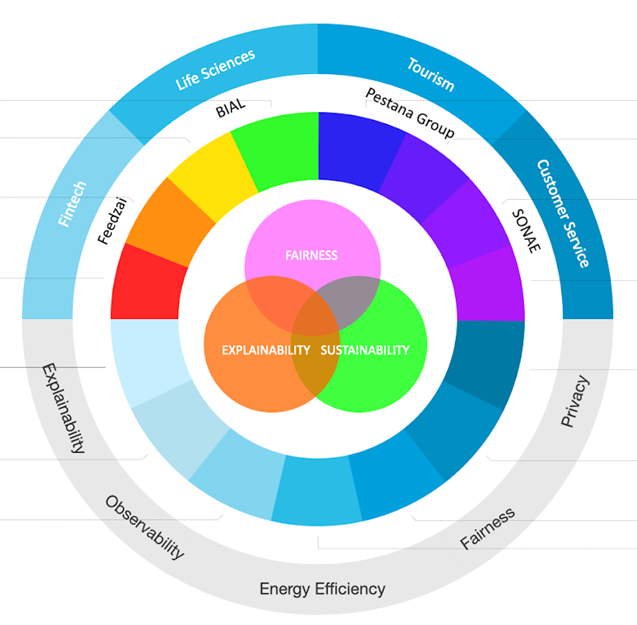
Responsible AI
The Center for Responsible AI aims to develop AI based-products that build on fair, explanable and sustainable AI. The products should be able to interact with the user relying on the knowledge provided from responsible AI.
HAVATAR
The project “Healthcare Added-Value Applications of Tele-Autonomous Robots” aims to develop new software skills for telepresence robots that will increase their level of autonomy, the teleoperation comfort of the user, and its social presence at the remote site.
Finished Research Projects

Augmented Human Assitance (CMU-PT)
The Augmented Human Assitance Project developed formal games and medical devices for healthy aging, having the robot Vizzy as the coach of the games.

IntelligentCare (CMU-PT)
The project “Intelligent Multimorbidity Management System” developed a patient centric solution to manage multimorbidity condition using artificial intelligence (AI) methods to explore data from the electronic health records (EHR) and measures reported remotely by the patients related to outcomes (PROMs) and to life events and quality of life, named as additional value variables (AVVs).

INSIDE (CMU-PT)
The project Intelligent Networked Robot Systems for Symbiotic Interaction with Children with Impaired Development developed a robotic system that learns by imitation how to interact with autistic children during therapy sessions.
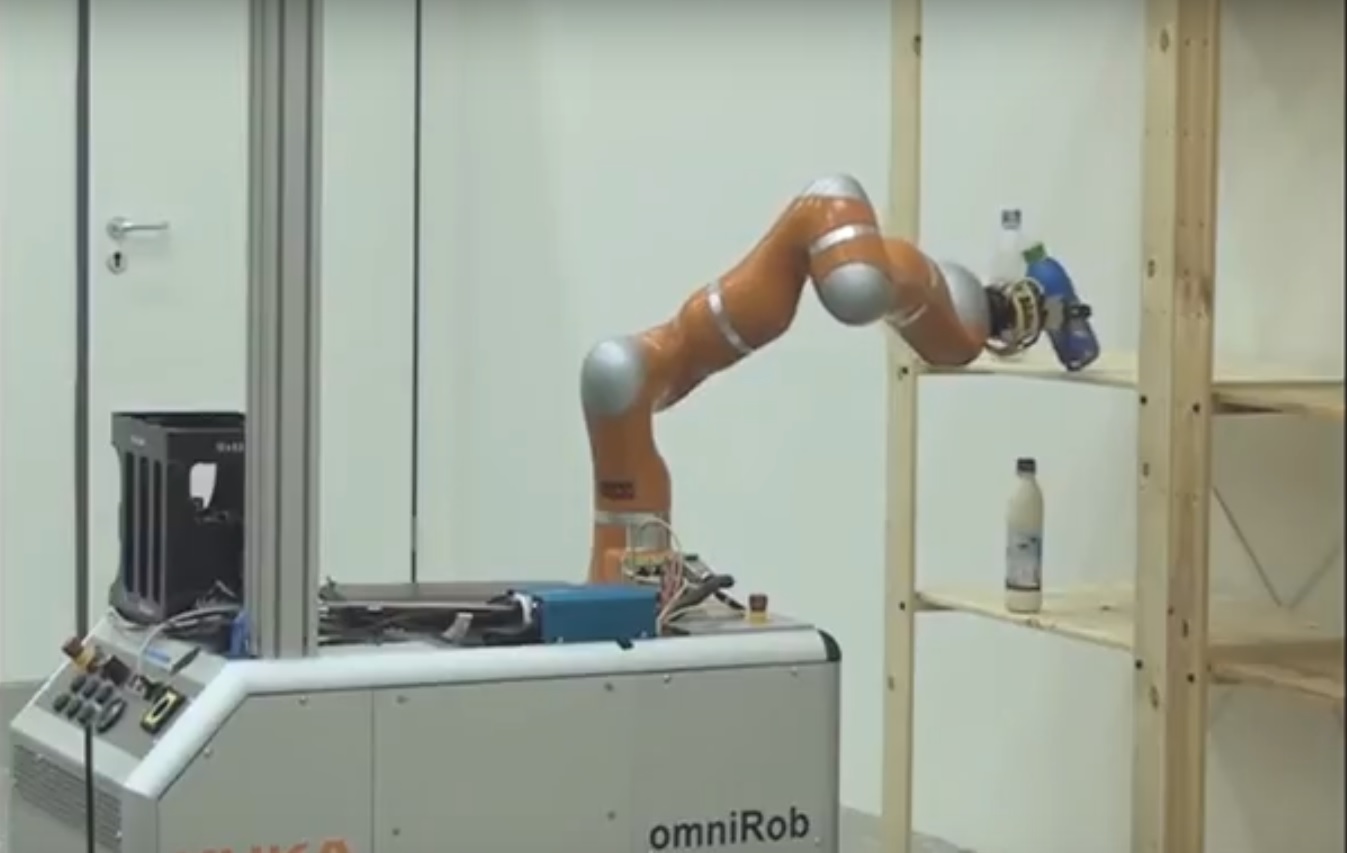
First-MM (EU)
The project Flexible Skill Acquisition and Intuitive Robot Tasking for Mobile Manipulation in the Real World developed a new generation of mobile robots with manipulation skills that can be programmed by non-experts.

MAIS-S (CMU-PT)
The project “Multiagent Intelligent Surveillance Systems” developed a surveillance system based on autonomous agents (mobile robots) that fill the gaps of the surveillance system and act according to warnings generated by the sensor system.

URUS (EU)
The Ubiquitous networking Robotics in Urban Settings project designed and evaluated develop a cognitive network robot architecture that enabled cooperation between urban robots, intelligent sensors and intelligent devices.
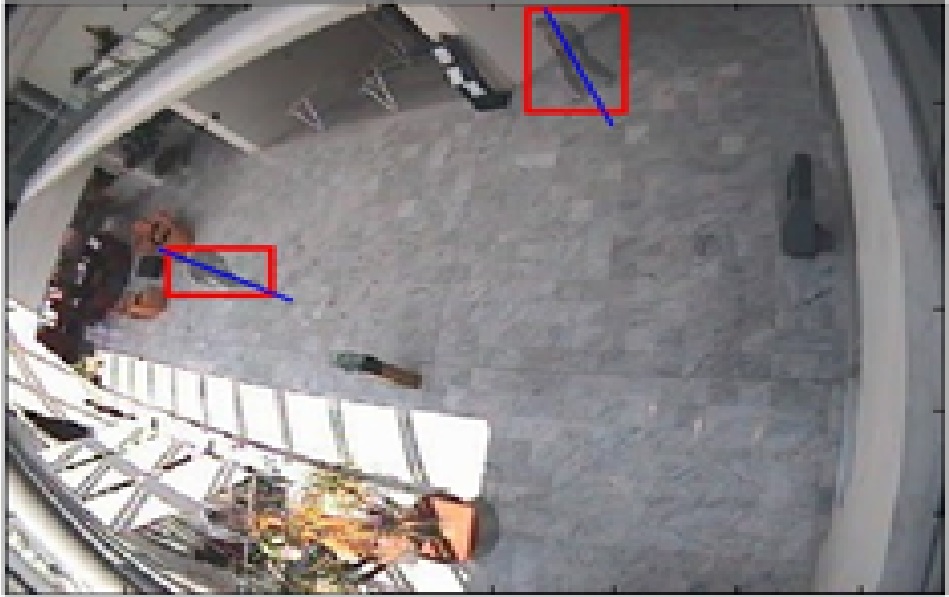
CAVIAR (EU)
The project “Context Aware Vision using Image-based Active Recognition” studied how rich local image descriptions from foveal and other image sensors, could provide cues to hierarchal visual attention processes. The application context was surveillnace in camera networks.